WaterPixels Forum: Several people have asked me about this in the past, so I tried to summarize it in this simple HOWTO. I am adding it as images …
WaterPixels Forum: Several people have asked me about this in the past, so I tried to summarize it in this simple HOWTO. I am adding it as images …
13.4. 2025 – Austria: Na bootu 2025 jsem měl možnost si prohlédnout EMWL Water Jacket. K Praktickému otestování této PRO varianty řešení problému EMWL při focení v kalné vodě, jsem se dostal až teď o víkendu v Rakousku. Velmi pěkné zázemí soukromé vody nedaleko Traismaueru nám posloužilo jako základna. Fotograficky se sice akce úplně nevydařila a to jak na soukromém rybníce, tak ani v nedaleké řece, ale cíl otestovat EMWL Water Jacket se podařil. Ergonomie práce v silném proudu rychle tekoucí řeky je významně lepší oproti stávajícímu nízkonákladovému řešení z roku 2021 a přirozeně v klidné vodě se tento benefit lehce ztrácí. Nicméně oddělitelnost EMWL od UW housingu je stále významnou výhodou i ve stojící vodě.

Nesporné výhody oproti nízkonákladovému QUICK&DIRTY řešení jsou tři:
Hlavní nevýhody aktuálně vidím také tři:
EMWL Water Jacket funguje ovšem velmi dobře a manipulace s ním je velmi příjemná, což se o QUICK&DIRTY řešení úplně říci nedá.

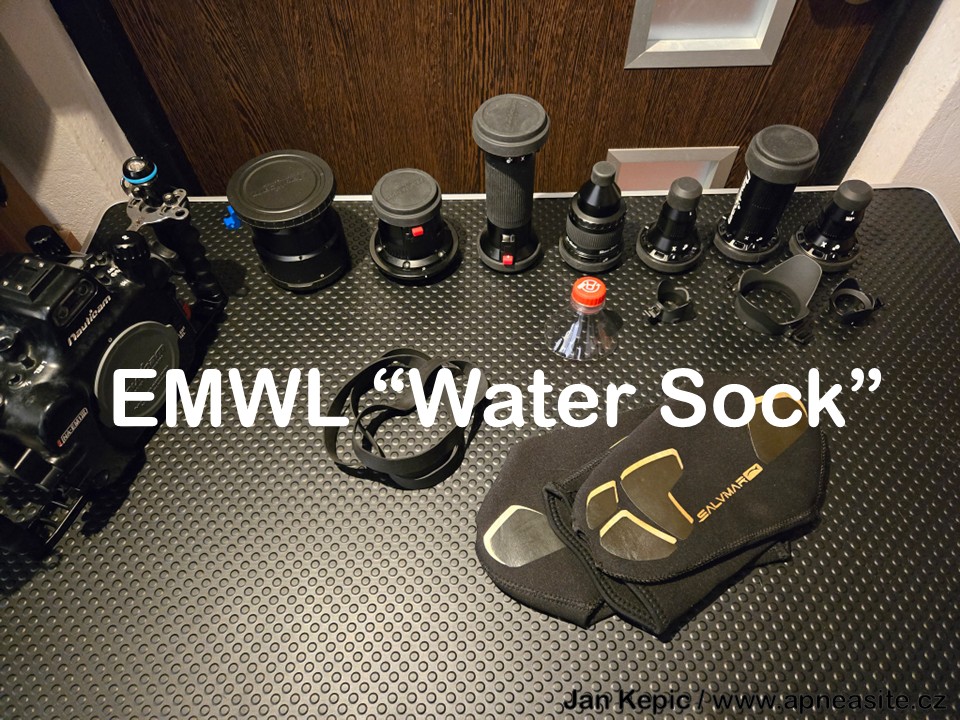
Na závěr ještě přikládám fotografii nízkonákladové QUICK&DIRTY alternativy (freediving sock), která mi dobře slouží od roku 2021 a kterou budu i nadále používat právě v podmínkách částečně ponořené soustavy tj. pro práci např. v loužích s 10 cm hloubkou (jako tady).

OM/Olympus na Antarktidě: Záznam z OM system livestreamu
Prezentace (jednotlivé snímky):

Ten pocit … když více jak po dvaceti letech vkládáš opět film do kamery. Teda 36 snímků a objektiv W-Nikkor 35mm s obojživelnou konstrukcí roku 1963
Calypso/Nikkor II – Nikonos II (Nikon)
Vše vypadá funkční a O-kroužky po prvním testu skutečně těsní. Je to jen pro zábavu a na vyzkoušení, jaké to měli „skoro“ pionýři UW fotografie.
NIKON v roce 1968 pro podobnost názvu s německou společností IKON uvedl na trh v Evropě do 50m vodotěsný fotoaparát Calypso/Nikkor II, který je až na pár kosmetických drobností prakticky totožný s fotoaparátem Nikon Nikonos II. Obojživelný objektiv W-Nikkor 35mm f/2.5 se pro focení pod hladinou až tak úplně nehodí a to zejména díky svému rovnému portu. FOV 62° nad hladinou se tak pod hladinou snižuje na pouhých 46°30′. To je opravdu hodně málo a aby to nebylo úplně snadné, tak i minimální zaostřovací vzdálenost je bohužel 0,8m. Což je naopak zase opravdu hodně daleko. Na hraní s Nikonosem by se hodil UW-Nikkor 15mm f/2.8, ale ten si stále i dnes majitelé velmi cení. Přeci jen ultra široká patnáctka s minimální ostřící vzdáleností 0,3m měla velmi vysokou pořizovací cenu pohybující se kolem $3000. No a tím dolarem se míní dolar sedmdesátých let minulého století. Na hraní a zábavu, tak abych si ještě více vážil toho, jaké možnosti máme dnes, bude muset stačit reportážní W-35mm.
OM SYSTEM: Krásy podvodního světa s Olympusem
Ikelite DS160 je parametry skvělý blesk, ale jeho rozměry mi s přibývajícími křížky na hrbu přestávají vyhovovat. Dvojice blesků Ikelite navíc vybavených dome difuzérem a umístěných na dlouhých ramenou není pro rychlý pohyb při freedivingu úplně tím nejlepším řešením z pohledu ergonomie. Delší dobu jsem relativně intenzivně zvažoval výměnu blesků za menší a finálním impulsem ke změně se stal až plánovaný výlet na Socorro (04/2022). Tři týdny intenzivního freedivingu v tomto podvodním ráji budou zcela jistě zátěží, kterou bude vhodné si ulehčit, jak jen to bude možné. Navíc dvojice menších blesků se pohodlně vejde společně s celým DSLR UW foto setem i do malého kabinového zavazadla. Tyto fakty již nebylo možné ignorovat i přestože dvojice DS160 mi slouží opravdu velmi dobře. Stalo se a dnes dorazila dvojice blesků Inon Z-330 Type2.

Inon Z-330 Type2 mě upoutal již červnovém vydání UwP (Underwater Photography magazine). První sevření Z-330 v ruce po otevření balíčku mě dnes opravdu potěšilo. To je ono a to jsou ty správné rozměry. Následoval první suchý test blesku s optickým odpalovačem (UW Technics) a DSLR (Olympus OM-D EM1III). Překvapivě vše intuitivně funkční hned na první pokus včetně manuálního ovládání intenzity záblesku obou blesků přímo z DSLR. Váha Z-330 je také potěšující a v porovnání obou modelů ve dvojici kompletně osazených blesků (akumulátory, kulové difuzéry, kovový palcový ball mount) vychází o více jak jeden kilogram lehčí oproti Ikelite (Inon 1648g oproti Ikelite 2716g). Na závěr jsem neodolal a pokusil jsem se kompletní UW set umísit do malého carry-on batohu. Vše se vejde a konečně mám bezpečně kompletní set (NA-EM1III) od extrémně širokých záběrů (WWL-1) až po makro (CMC-1) včetně blesků (2x Z-330) v jednom malém kabinovém zavazadle. Super a už se těším na otestování blesků při nejbližší příležitosti pod hladinou.


